Durchbruch in der Robotik-Forschung mit lernender KI: Roboter greift intuitiv und bewegt Gegenstände wie ein Mensch
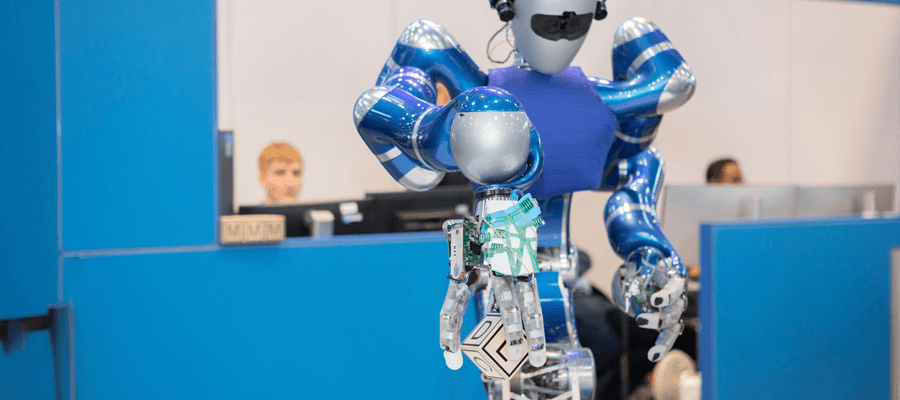
Agile Justin weiß, wie er Gegenstände richtig greift – sogar wenn er sie noch nicht kennt. Der humanoide Roboter kann Dinge in der Hand auch in jede gewünschte Richtung drehen – ohne dabei hinzusehen. Für Menschen ist das alltäglich, für Roboter extrem schwierig. Ein Team vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) hat jetzt Robotern diese hochkomplexen Fähigkeiten beigebracht. Dazu haben die Wissenschaftlerinnen und Wissenschaftler lernende künstliche Intelligenz (KI) eingesetzt und so einen Durchbruch in der KI-Robotik erzielt.
Agile Justin hat Sensoren in seinen beiden vierfingrigen Roboterhänden: Er „fühlt“ damit die Gegenstände. Seine Fähigkeiten hat er kürzlich bei der automatica Messe gezeigt. Die Fingerfertigkeit gilt unter Robotik-Forschenden als große Herausforderung. „Durch neue Verfahren der lernenden künstlichen Intelligenz ist es erstmalig gelungen, Fähigkeiten mit der mechatronisch hochentwickelten DLR-Hand zu zeigen, die nahe an die menschliche Geschicklichkeit heranreichen: Insbesondere das blind ausgeführte Drehen und Manipulieren von Objekten mit einer nach unten offenen Hand war eine Herausforderung“, sagt Prof. Berthold Bäuml vom DLR-Institut für Robotik und Mechatronik in Oberpfaffenhofen. Berthold Bäumls KI-Forschung bringt den humanoiden Roboter Justin schon seit vielen Jahren voran: Justin fängt zum Beispiel Bälle, die ihm zugeworfen werden, oder erkennt Materialien durch Abtasten mit den Fingern. Jetzt hat selbstständig lernende KI Justins Möglichkeiten entscheidend erweitert.
„Objekt drehen ist gut. Objekt fallen lassen ist schlecht“
Die Wissenschaftlerinnen und Wissenschaftler nutzen sogenanntes Deep Reinforcement Learning. Das bedeutet, Justin lernt völlig eigenständig alleine durch Vorgabe, was richtig oder falsch ist. In dieser Anwendung zum Beispiel durch „Das Objekt in Richtung Zielvorgabe drehen ist gut” und „Das Objekt fallen lassen ist schlecht“. Das maschinelle Lernen von Geschicklichkeiten dauert nur zwei bis drei Stunden in einer Simulation. Dann beherrscht Justin die Aufgabe. Die Bewegungsstrategie für die Finger entwickelt er dabei ganz ähnlich wie ein Mensch durch Ausprobieren. „Der Roboter kann seine Lösungen in der realen Umgebung anschließend direkt umsetzen. Auch wir als Forschende sind oft überrascht. Die Möglichkeiten unserer neuen lernenden KI-Methoden sind faszinierend“, sagt Berthold Bäuml.
Tausende Beispiele für zehntausende Dinge
Zusätzlich ist eine weitere Premiere in der KI-Robotik gelungen: Justin greift beliebige Objekte mit seiner mehrfingrigen Hand. Hier haben die Forschenden zwei wesentliche Probleme durch KI gelöst. Aus 50.000 Beispielen hat der Roboter ein sogenanntes „Foundational Model“ gelernt, wodurch er von der sichtbaren Vorderseite auf die Form der Rückseite schließen kann. Justin hat also ein Verständnis für 3D-Formen erworben. Als Zweites kann Justin eine optimale Position der Hand finden und seine insgesamt zwölf Fingergelenke passend einstellen. Menschen greifen Gegenstände intuitiv. Um diese Intuition auch dem Roboter zu vermitteln, wurde eine weitere KI mit tausenden Beispielen für zehntausende Objekte gefüttert. „Die Berechnung benötigte einige Tage. Aber jetzt kann der Roboter den richtigen Griff innerhalb von Sekundenbruchteilen abrufen“, erklärt Berthold Bäuml. Auf der automatica hat Justin seine Fingerfertigkeit schon mit Gegenständen gezeigt, die aus dem Publikum gereicht wurden.
„Die Arbeiten zur KI-basierten geschickten Manipulation stellen einen weltweiten wissenschaftlichen Durchbruch dar. Noch nie waren Hände in der Lage, eine so große Vielzahl von Objekten so schnell und so präzise zu manipulieren. Der Erfolg war nur durch den kombinierten Einsatz von neuesten KI-Methoden mit modelbasierten methodischen Ansätzen und langjähriger Robotik-Erfahrung möglich“, sagt Prof. Alin Albu-Schäffer, Direktor des DLR-Instituts für Robotik und Mechatronik. „Bisher ging man häufig davon aus, dass man zum Erlernen von geschickter Objekthandhabung mit Roboterhänden eine sehr große Menge an Daten braucht. Im Gegensatz zu den Daten für Large Language Models, sind Experimentdaten in der Robotik, selbst wenn man sie durch Simulation erzeugt, sehr aufwendig. Das DLR-Forschungsteam hat nun einen Weg gefunden, weniger Daten zu benötigen, indem es mehr Robotik-Wissen und eine neue Lernarchitektur nutzt. So kann das Team diese Modelle sogar auf einfachen Rechnern trainieren und braucht keinen großen Cluster.“
Chancen für die industrielle Produktion und die Pflege
Der nächste große Schritt der Robotik könnte in der industriellen Fertigung erfolgen. Mehrfingrige Roboterhände könnten sehr komplexe und kleine Teile montieren, wenn sie die flexible, standardmäßig intelligente Manipulation beherrschen. DLR-Forschende arbeiten daran zum Beispiel im Projekt „SmartHand“.
Robotische Assistenten sind auch in der Pflege ein Thema. Sie könnten in der Zukunft Pflegekräfte entlasten und Menschen mit Einschränkungen ein höheres Maß an Selbstständigkeit im Alltag zurückgeben. Dazu sind die am DLR erarbeiteten Fähigkeiten der intelligenten Manipulation ebenfalls grundlegend. Das gilt zum Beispiel, wenn es um das sichere Greifen von Tassen, Schüsseln, Schachteln oder anderen vielfältig geformten Haushaltsgegenständen geht.
Über das DLR-Institut für Robotik und Mechatronik
Das Institut für Robotik und Mechatronik in Oberpfaffenhofen entwickelt Roboter, die es den Menschen ermöglichen, wirkungsvoller, effizient und sicher mit der Umwelt zu interagieren. Die Roboter sollen in Umgebungen wirken, die für Menschen unzugänglich oder gefährlich sind. Sie sollen den Menschen aber auch während der Arbeit und im alltäglichen Leben unterstützen und entlasten.
Die Forschungsgruppe von Prof. Berthold Bäuml innerhalb des Instituts setzt auf Deep Learning als Kernprinzip für den Bau autonomer Roboter. Sie sollen sich durch die Verbindung von Sensorik und Motorik mit lernender KI menschlichen Fähigkeiten annähern. Die hochqualifizierten Mitarbeitenden der jungen KI-Forschungsgruppe kommen vor allem aus der Technischen Universtität München, wo Berthold Bäuml einen Lehrauftrag hat. Außerdem bestehen Forschungskooperationen mit renommierten Technologieunternehmen.
Wenn Sie Google als Suchmaschine nutzen, können Sie Drones als bevorzugte Quelle hinterlegen, damit unsere Inhalte häufiger für Sie erscheinen. Fügen Sie Drones als bevorzugte Quelle hinzu.
Im Drones PR-Portal erscheinen Nachrichten und Meldungen von Unternehmen aus der Drone-Economy. Für die Inhalte der Pressemitteilungen sind die jeweiligen Unternehmen verantwortlich.