Inspired by nature
Autonom agierende Drohnen, die selbständig in komplexen Szenarien agieren und auf plötzliche Ereignisse reagieren können, bieten enorme Zukunftspotenziale. Ist die Entwicklung der dafür erforderlichen Technik bereits eine große Herausforderung, so potenziert sich das Ganze noch, wenn es um die Interaktion in intelligenten Drohnenschwärmen geht. Dementsprechend spektakulär sind die Erkenntnisse, die von Wissenschaftlerinnen und Wissenschaftlern der Polytechnischen Hochschule Lausanne sowie der TU Delft vorgestellt wurden.
Man kennt das von der Autobahn. Plötzlich staut sich der Verkehr und wenn sich das Ganze Minuten später aufgelöst hat, dann fragt man sich, warum es auf freier Strecke zu einem Stau kommen konnte. Dabei bedarf es nur einer Kleinigkeit, damit sich der eigentlich fließende Verkehr wie bei einer Ziehharmonika erst ballt, bevor sich alles wieder entzerrt. Ein Problem, das auch innerhalb von Drohnenschwärmen auftreten kann – und im schlimmsten Fall zu einer Massenkarambolage führt. Ganz wie auf der Autobahn. Wie sich unbemannte Flugsysteme nicht nur individuell in einem mit Hindernissen versehenen Luftraum zurechtfinden, sondern auch als Gruppe interagieren und Kollisionen vermeiden können, das ist Gegenstand der Arbeit von Enrica Soria, Doktorandin am Laboratory of Intelligent Systems der École polytechnique fédérale de Lausanne (EPFL).
Vorausschauend
Sie hat ein vorausschauendes Steuerungsmodell entwickelt, mit dem Drohnen nicht nur auf andere im Schwarm reagieren, sondern auch ihre eigenen Bewegungen antizipieren und die ihrer Nachbarn vorhersagen können. „Unser Modell gibt Drohnen die Möglichkeit zu erkennen, wenn ein Nachbar langsamer wird, was bedeutet, dass sich die Verlangsamung weniger auf den eigenen Flug auswirkt“, erläutert Soria. Anders als beispielsweise bei Light-Shows, bei denen hunderte Drohnen von einem zentralen Rechner gesteuert vorgegebene Routen abfliegen, reagieren die einzelnen Flugsysteme innerhalb eines Schwarms mit der in Lausanne entwickelten Technik individuell auf ihre Umgebung – agieren jedoch zugleich als Teil des Schwarms. So, wie es zum Beispiel auch Vögel oder Fische tun. „Bei unserem Modell werden Drohnen anhand lokaler Informationen navigiert und können ihre Flugbahn autonom ändern“, erläutert Soria. Dabei müssen sie im Grunde nur ein paar recht simple Bedingungen erfüllen, beispielsweise einen definierten Mindestabstand einhalten, in einer Sollgeschwindigkeit fliegen oder eine bestimmte Richtung einschlagen.
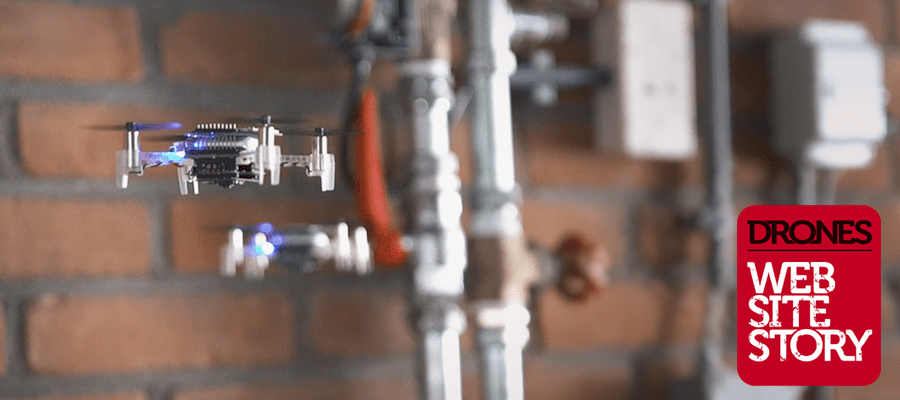
Noch einen Schritt weiter in der Interaktion innerhalb intelligenter Drohnenschwärme geht das Projekt, das Forschende der Technischen Universität im holländischen Delft kürzlich vorgestellt haben. Gemeinsam mit Kolleginnen und Kollegen der Universität Barcelona und der Harvard University wurde ein System entwickelt, mit dem ein Schwarm kleiner Drohnen autonom ein Gasleck innerhalb einer komplexen Umgebung wie beispielsweise einem Fabrikgebäude ausfindig machen kann. Dabei muss die Hardware der bewusst klein gehaltenen Fluggeräte – diese sollen schließlich möglichst flexibel und auch bei wenig Platz einsetzbar sein – Raum für jede Menge Technik und Sensorik bieten.
Getrennt agieren, gemeinsam funktionieren
Dabei agieren die einzelnen Drohnen zunächst unabhängig voneinander und erkunden autonom das Einsatzgebiet, in dem sie selbständig navigieren, Hindernissen und natürlich auch sich gegenseitig ausweichen. Hat dann ein Flugsystem mit der an Bord befindlichen Sensorik eine erhöhte Gaskonzentration in der Luft erkannt, wird die Info an alle anderen Drohnen des Schwarm weitergegeben, die sich daraufhin in die Richtung orientieren, aus der die erste Gasdetektion gemeldet wurde. Im Zusammenspiel aller Drohnen wird nun Stück für Stück das Gasleck „eingekreist“ und schließlich ausfindig gemacht.
„Wir sind überzeugt, dass Schwärme winziger Drohnen ein vielversprechender Weg zur autonomen Lokalisierung von Gasquellen sind“, sagt Guido de Croon, ordentlicher Professor am Micro Air Vehicle Laboratory der TU Delft. „Die geringe Größe der Drohnen macht sie für alle Menschen und Gegenstände, die sich noch im Gebäude befinden, zu einem geringen Risiko, während ihre Flugfähigkeit es ihnen ermöglicht, die Quelle schließlich in drei Dimensionen zu suchen. Darüber hinaus ermöglicht ihre geringe Größe es ihnen, in engen Innenbereichen zu fliegen.” Die Suche nach der maximalen Gaskonzentration basiert auf einem Algorithmus namens „Particle Swarm Optimization“ (PSO), wobei jede Drohne ein „Partikel“ ist. Der Algorithmus wurde dem Sozialverhalten und der Bewegung von Vogelschwärmen nachempfunden. Jede Drohne als Individuum bewegt sich während der gemeinsamen Suche auf Basis der eigenen Gas-Wahrnehmung, berücksichtigt jedoch gleichzeitig die Position der höchsten im gesamten Schwarm gemessenen Gaskonzentration sowie die eigene Massenträgheit in der aktuellen Bewegungsrichtung. Als Suchstrategie hat PSO den Vorteil, dass nur die Gaskonzentration gemessen werden muss und nicht der Gaskonzentrationsgradient oder die Windrichtung. Darüber hinaus ermöglicht es dem Schwarm, lokale Maxima zu ignorieren, die in komplexen Umgebungen auftreten können.
Lese-Tipp: DLR arbeitet an System zur Erkennung und Schutz vor Waldbränden
Foto: Springstof Media & TU Delft
Wenn Sie Google als Suchmaschine nutzen, können Sie Drones als bevorzugte Quelle hinterlegen, damit unsere Inhalte häufiger für Sie erscheinen. Fügen Sie Drones als bevorzugte Quelle hinzu.