
Über Störungen des GPS-Signals und deren Auswirkungen auf den UAS-Betrieb
Seit dem Jahreswechsel häufen sich Fälle mysteriöser Störungen des GPS-Signals über der Ostsee, die Schiff- und Luftfahrt bis ins nördliche Brandenburg hinein vor Herausforderungen stellen. Eine natürliche Ursache, wie etwa Auswirkungen der Sonnenwinde, gilt als ausgeschlossen. Zudem scheint sicher, dass keine technischen Defekte vorliegen. Doch egal, ob nun bewusstes GPS-Jamming oder etwas anderes dahintersteckt: Für den UAS-Betrieb kann eine solche Störung weitreichende Folgen haben.
Von Jens Rosenow
Ende des vergangenen Jahres bemerkte die Ostseeschifffahrt erstmals Ungenauigkeiten im Signal des weltweiten Navigationssystems GPS (Global Positioning System). Das für den kommerziellen Schiffsverkehr vorgeschriebene AIS (Automatic Identification System) ist vergleichbar mit dem Transponder an Bord von bemannten Luftfahrzeugen: Es überträgt Kennung und Position des jeweiligen Wasserfahrzeugs. Wie in der Luftfahrt sind exakte Koordinaten zur Positionsbestimmung und das Routing auf dem Wasser auch in der Seefahrt zentrale Voraussetzungen für den sicheren Betrieb. Im Notfall wird die schnelle Rettung zu den letzten bekannten Koordinaten entsandt. Wenn die nicht stimmen, stehen Leben auf dem Spiel.
Starke Schwankungen
Nach den ersten Meldungen aus der Schifffahrt dauerte es nicht lange, bis sich die Einschränkungen auch in der bemannten Luftfahrt zeigten. Airliner, aber auch Privatpiloten, machten die beunruhigende Erfahrung, dass über dem nördlichen Brandenburg bis weit über Rügen in Mecklenburg-Vorpommern hinaus das GPS-Signal starken Schwankungen unterlag. Störungen im GPS sind auch für die Luftfahrt eine ernstzunehmende Angelegenheit. Der permanente Datenstrom aus dem Weltall soll perspektivisch sogar die altbekannte Instrumentenlandesystemtechnik ablösen, mit deren Hilfe an Verkehrsflughäfen für anfliegenden Luftverkehr ein horizontaler und ein vertikaler Gleitpfad aus Funksignalen bis zur Aufsetzzone auf der Landebahn generiert werden.
Im Falle einer GPS-Störung stehen noch zusätzliche GNSS-Signale zur Verfügung. Allerdings ist auch deren Empfangsqualität unter bestimmten Voraussetzungen nicht ausreichend für den automatisierten UAS-Betrieb
Mit den Daten aus Navigationssatelliten wird eine relativ genaue Positionsbestimmung auf der Erde möglich. In diesen Daten sind die Koordinaten des Satelliten zum Zeitpunkt der Aussendung in 20.200 Kilometern über der Erde und vor allem Zeitstempel enthalten, mit denen der Empfänger auf der Erde oder an Bord eines Luftfahrzeugs Laufzeitberechnungen durchführt, indem die Eintreffzeit eines solchen Datenpakets mit der eigenen Zeit verglichen wird. Die Anzahl an Millisekunden ergibt die Laufzeit und die Relation zur Position des Satelliten über der Erde ermöglicht die Berechnung der Position des Empfängers auf der Erde. Für diese Form der Triangulation braucht es Sichtkontakt zu mehreren der Erdtrabanten.
„Lost in Airspace“
Was passiert, wenn diese Daten nicht stimmen, konnte man im James Bond Film „Der Morgen stirbt nie“ ganz gut nachvollziehen: Ein Schiff auf dem Wasser kann unbemerkt hunderte Seemeilen vom Kurs abkommen. In der bemannten Luftfahrt wird mit falschen GPS-Daten ein automatisierter Anflug auf eine Landebahn unmöglich. Während Privatpiloten immer noch einen Blick aus dem Fenster werfen können und Waldkanten, Bahnstrecken sowie kleine Ortschaften als Referenz zur Verfügung haben, sind große Airliner quasi „Lost in Airspace“. Aus 30.000 Fuß sieht aus dem Cockpitfenster alles gleich klein aus. Aus dieser Höhe einen planmäßigen Abstieg zur Landung auf einer Landebahn hinzubekommen, nötigt der Crew ein Rückgriff auf jetzt schon fast historische Navigationskünste mit Hilfe von Funkfeuern und Kreuzpeilung beziehungsweise Kursvorgaben der Flutlotsen am Boden auf Basis von Radarechos ab. Diese Fähigkeiten hat eine Drohne bekanntermaßen nicht.
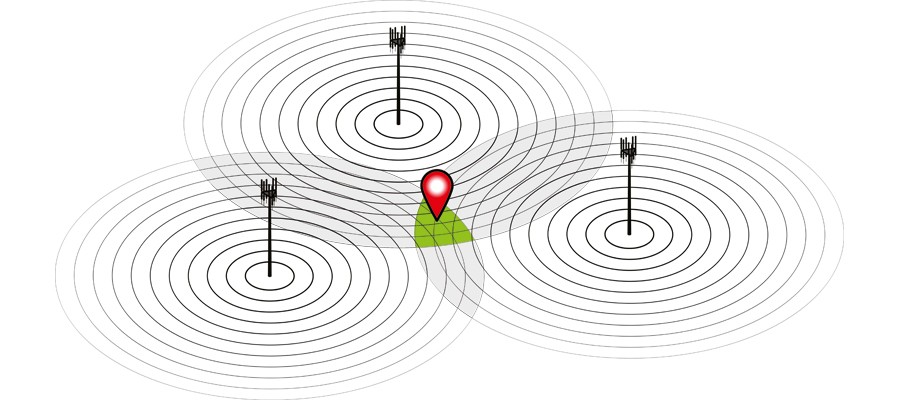
Da die Positionsbestimmung im Grunde auf geometrischen Berechnungen beruht, ist der Kontakt zu mehreren Satelliten erforderlich, um GNSS-Technik nutzen zu können
Ganz augenscheinlich ist das GPS-Signal über dem östlichen Ostseeraum aber nicht gefälscht (man spricht vom Spoofing, zu Deutsch „manipuliert“), sondern die Frequenzen scheinen tatsächlich von einer leistungsstarken Funksignalquelle gestört oder zumindest überlagert („Jamming“). Im Endeffekt steht das GPS-Signal in so einem Fall für eine valide Datengenerierung nicht zur Verfügung. Und das kann gravierende Auswirkungen auf den UAS-Betrieb haben. Denn von Beginn an hat sich die unbemannte Luftfahrt auf die permanente Verfügbarkeit von GNSS (Global Navigation System Services) gestützt. Es galt als gegebener Fakt, dass die Daten aus dem All durchgängig und lückenlos auf der Erde zur Verfügung stehen. Erst in jüngerer Zeit und mit zunehmender Etablierung des Verkehrsträgers Drohne widmen sich Forschungs- und Entwicklungsprojekte dem Flugbetrieb in Umgebungen ohne Verfügbarkeit von Satellitendaten („GNSS denied environments“).
Redundanzen
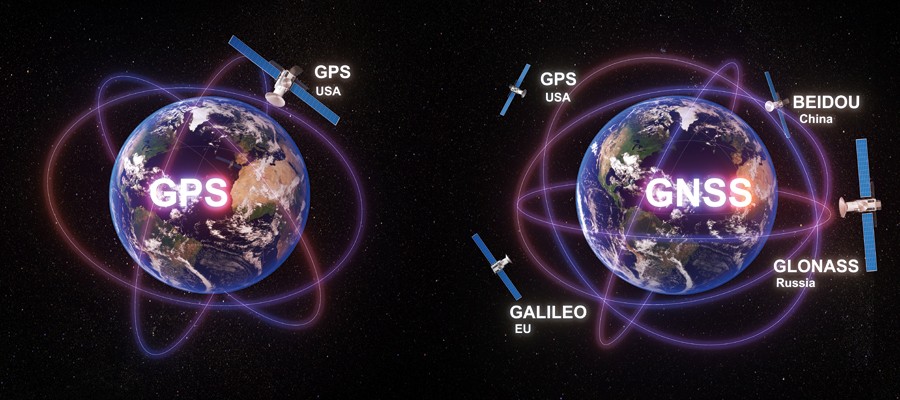
Lange Zeit jedoch wurde ein Ausfall des Systems nicht ernsthaft in Betracht gezogen und allenfalls dadurch mitigiert, dass man eben nicht nur GPS (übrigens das älteste aller Navigationssysteme mit dem ersten Satelliten im Orbit damals im Jahr 1973), sondern inzwischen auch das europäische Galileo-System, das russische GLONASS und das chinesische Beidou (zu Deutsch „Großer Bär“ mit einer angeblichen Genauigkeit von 4,4 Metern) für Positionsbestimmungen heranzieht.

Rund um die Erde sind diverse Satelliten unterwegs, um moderne Navigationstechnologie zu ermöglichen. Zum Beispiel den BVLOS-Betrieb von Drohnen
Moderne GNSS-Empfänger an Bord einer Drohne sind in der Lage, die verschiedenen Signale zu empfangen und mit einem mehrstufigen Rechenprozess eine gültige Lösung zu generieren, die dann vom Prozessor in Fluglagekorrekturen umgewandelt werden. Für eine Drohne, die zum Beispiel im BVLOS-Betrieb von einer Position A zu einer Position B fliegen soll, ist das Ganze nichts weiter als ein Rechenprozess. Am Startpunkt werden die Koordinaten ermittelt und die Richtung und Entfernung zum Zielpunkt werden in Koordinatensekunden auf diese Start-Koordinate aufgerechnet. Die Drohne fliegt nun so lange in diese Richtung, bis Soll-Koordinate und Ist-Koordinate mit Grad, Minuten und Sekunden übereinstimmen. So erreicht das UAS den Zielort.
Abweichungen
In einem vom Autor betreuten, bundesweiten Drohnen-Erprobungsprojekt waren Störungen in den GNSS-Daten ein regelmäßiger Begleiter. Bei der Landung in der Nähe von künstlichen Hindernissen – in diesem Fall Stahlbeton-Fassaden eines Krankenhauses mit weiteren künstlichen Frequenzstörquellen wie zum Beispiel strahlungsintensiven medizinischen Großgeräten im Innern der Gebäude – hatte die Versuchsdrohne immer wieder signifikante Probleme. Zwar waren die Algorithmen in den Rechenkernen durchaus intelligent, doch die Leistung der Prozessoren hatte ihre Grenzen. Wenn beispielsweise das Signal aus dem All nicht direkt zum Empfänger gelangt, sondern vorher von einem Hindernis reflektiert wurde, dann führen Millisekunden längere Laufzeit des Signals im Verhältnis zum im Datenpaket enthaltenen Zeitstempel automatisch zu einer fehlerhaften Abweichung in der Positionsberechnung.

Im Umfeld von Krankenhäusern und Forschungseinrichtungen können strahlungsintensive Geräte dazu beitragen, den GPS-Empfang zu beeinträchtigen
In den meisten Fällen beginnt die Drohne dann „zu schwimmen“ und auf der Stelle hin und her zu wandern. Kommt der Algorithmus an Bord nicht innerhalb kürzester Zeit zu einem eindeutigen (also gültigen) Rechenergebnis für die eigene Position, ist die Drohne ohne manuellen Eingriff an einer Fernsteuerung eigentlich dem sicheren Absturz geweiht. Über die IMU (Internal Measuring Unit) kann das UAS noch eine Zeit lang die eigene Lage im Raum halten und auf der Basis auch berechnen, doch diese Notlösung hält nicht sehr lang. Die durch die GNSS-Fehler induzierten Schwankungen des Gesamtsystems beeinflussen letztendlich auch den Mini-Gyroskopen im IMU-Prozessor, der schon bald weit außerhalb der für einen stabilen Flug notwendigen Genauigkeit läuft. In einem solchen Fall ist guter Rat teuer – und um solche Fälle abzufangen und als Risiko auszuschließen, sind nochmals enorme Entwicklungsanstrengungen erforderlich, an deren Ende aber auch ein so großes Preisschild steht, dass eine vermarktungsfähige Lösung in weiter Ferne scheint.
Real-Time Kinematik
Nicht anders verhält es sich, wenn das GNSS-Signal plötzlich gar nicht mehr zur Verfügung steht. Ohne GNSS ist eine marktübliche Drohne bei notwendigen präzisen Landungen verloren – und da macht es keinen Unterschied, ob das Signal verfälscht oder auch gar nicht zur Verfügung steht. Natürlich versprechen alle Hersteller unisono, dass man ja, wie oben beschrieben, verschiedene GNSS-Systeme an Bord der Drohne empfängt. Doch diese Aussagen sind durchaus kritisch zu hinterfragen. Erst recht, wenn man das vermeintliche Zauberwort „RTK“ im gleichen Atemzug zu hören bekommt. In der Real-Time Kinematik werden über einen weiteren Datenweg (zum Beispiel Onlineverbindung) Korrekturdaten empfangen, die ein GNSS-Signal in die Zentimetergenauigkeit bringen. Das ist für präzise Landungen auf engem Raum, wie beispielsweise eine Landeplattform an einem Krankenhaus, ein absolutes Muss. Weniger bekannt ist allerdings die Tatsache, dass sich dieser Korrekturdienst vielerorts und ausschließlich auf die Daten der GPS-Satelliten stützt und auch regional unterschiedlich und in schwankender Qualität zur Verfügung steht. Für die Korrektur der anderen oben genannten GNSS-Satellitensysteme sind andere RTK-Daten zu beziehen, bisweilen sind diese aber auch nicht für jeden Punkt auf der Erde erhältlich. Schließlich wurde das RTK-Verfahren für die Geodäsie entwickelt und war niemals für die Live-Verwendung einer BVLOS-Drohne im Streckenflug vorgesehen. Schon aus diesem Grunde ist RTK als „Wunderlösung“ für die Korrektur von Satellitendaten im Drohnenbetrieb mit äußerster Vorsicht zu genießen, dessen Wert in Abhängigkeit vom konkreten Einsatzszenario zu betrachten ist.

Eine möglichst präzise Geolokalisation ist nicht nur für unbemannte Flugsysteme wichtig, auch automatisiert oder gar autonom agierende Straßenfahrzeuge müssen zu jedem Zeitpunkt „wissen“, wo sie sich befinden
Was bedeutet nun aber ein fehlendes GPS-Signal für den Drohnenflugbetrieb? Aus Sicht einer Drohne ist der Streckenflug mit wechselnden GNSS-Quellen unerheblich. Solange der GNSS-Empfänger an Bord eine plausible Lösung erzeugt, steuert der Prozessor die Drohne im Genauigkeitsbereich von mehreren Metern in Richtung Ziel. In der Luft ist es in der Regel ohnehin unerheblich, ob die Drohne 2 Meter weiter links oder rechts fliegt. Selbst in der Risikobetrachtung für die SORA (Specific Operational Risk Assessment) befindet sich eine Drohne damit in jedem Fall noch im grünen Bereich. Für eine präzise Landung am Zielort muss jedoch zwingend eine zentimetergenaue Datenlage bestehen. Ist dies nicht der Fall, dann wird die Landung unweigerlich unpräzise, wenn unter Einbezug des RTK und falscher oder fehlender GPS-Daten kein plausibles Rechenergebnis erzeugt werden kann und dann automatisch ein Rückgriff auf die (unkorrigiert ebenfalls ungenauen) Positionsdaten von Galileo, GLONASS oder Beidou erfolgt, Letzteres steht in Deutschland für den GNSS-Empfänger an Bord der Drohne übrigens so tief über dem Horizont, dass der Kontakt zu diesen Daten bei einer Landung in einer Hinderniskulisse unweigerlich als Erstes verloren geht. Die Zentimetergenauigkeit ist also im worst case schlagartig weg und die Landung wird nur im weitaus gröberen Raster mehrerer Meter möglich. Die Drohne wird den angesteuerten Zielpunkt unweigerlich um etliche Meter verfehlen. Bei entsprechendem Seitenwind sogar noch deutlich darüber. Wenn dann das Dach beispielsweise eines Krankenhauses dort bereits zu Ende ist oder sich ein Hindernis dort auftürmt, dann gelingt eine automatische Landung nicht mehr mit der gebotenen Regelmäßigkeit.
Flugbetrieb unterbrochen
Welche Folgen ein gestörtes GPS-Signal für den Drohnenflugbetrieb haben kann, wurde beispielhaft im Februar 2023 spürbar. Als der US-Präsident Joe Biden mit seiner Airforce One in Polen eintraf, um dort über den Krieg in der Ukraine zu sprechen, ging das GPS-Signal in seiner Qualität dermaßen runter, dass auch eine RTK-Korrektur keine Chance mehr hatte. Die diversen Korrekturdienste der Bundesländer stellten an diesem Tag mit einem entsprechenden Hinweis ihre Services ein. Bis weit nach Süddeutschland waren präzise Drohnenlandungen unmöglich und der Flugbetrieb musste kurzerhand unterbrochen werden. Die wichtigste Erkenntnis daraus: GNSS-Daten aus dem Weltall sind keine störungsfreie und vor allem keine zu jedem Zeitpunkt und unter allen Umgebungsbedingungen verlässliche Lösung. Kommerzielle Drohnen im BVLOS-Betrieb, die Start und Landung vollautomatisch ausführen, sollten also zwangsläufig eine Plan-B-Technologie an Bord haben – und die IMU ist es aus bereits dargelegten Gründen eindeutig nicht.

Je herausfordernder die Umgebung, desto wichtiger sind hochpräzise Navigationsdaten. Kommt es hier zu Störungen, kann das für unbemannte Systeme gravierende Folgen haben
Inzwischen gibt es im Übrigen erste Erkenntnisse bezüglich der über dem Ostseeraum festgestellten Störungen der GPS-Signale. Das Phänomen tritt Experten zufolge wohl in wechselhafter Ausprägung und Stärke auf. Eine großflächige Störung der GPS-Frequenzen in einem Gebiet von Nordostdeutschland über die Ostsee hinüber bis nach Skandinavien setzt eine nennenswerte energiereiche Störstrahlungsquelle mit riesigen Antennenanlagen voraus. Man kann deshalb davon ausgehen, dass es sich hier um einen staatlichen Akteur handeln muss. Bei den für solche sicherheitsrelevanten Themen zuständigen Bundesministerien gibt man sich diesbezüglich allerdings zugeknöpft: „Verschlusssache“.
Fotos: olly, oselote, Zern Liew, Sliver, Andrei Armiagov, kaliantye, metamorworks, Simone – alle stock.adobe.com




